January 20, 2026
Integrating the LeRobot SO101 on the ECOSense project
My journey of integrating, calibrating, and controlling the SO101 5-axis robotic arm for the ECOSense waste-collecting robot.
When we first sat down to plan the ECOSense project, the (fictional) client suggested a simple 2-axis robotic arm for trash collection. It sounded straightforward: drive up to a soda can, align the vehicle, and let a basic mechanical link grab it. But in real-world robotics, alignment is never simple. Relying on perfect vehicle positioning meant the navigation stack would need to perform slow, complex micro-maneuvers just to line up a pick. After researching for all the possible options in our budget I proposed a different path: integrating the SO101 5-axis robotic arm. In one hand (pun intended), the extra degrees of freedom would give us the dexterity to pick objects from varying angles, offloading precision demands from the vehicle’s drive system to the arm. And in the other hand, it would be a massive opportunity for me to try the trending arm from Hugging Face and train a VLA model to control it!
Here is how I went from the idea to a fully coordinated pick-and-place system.
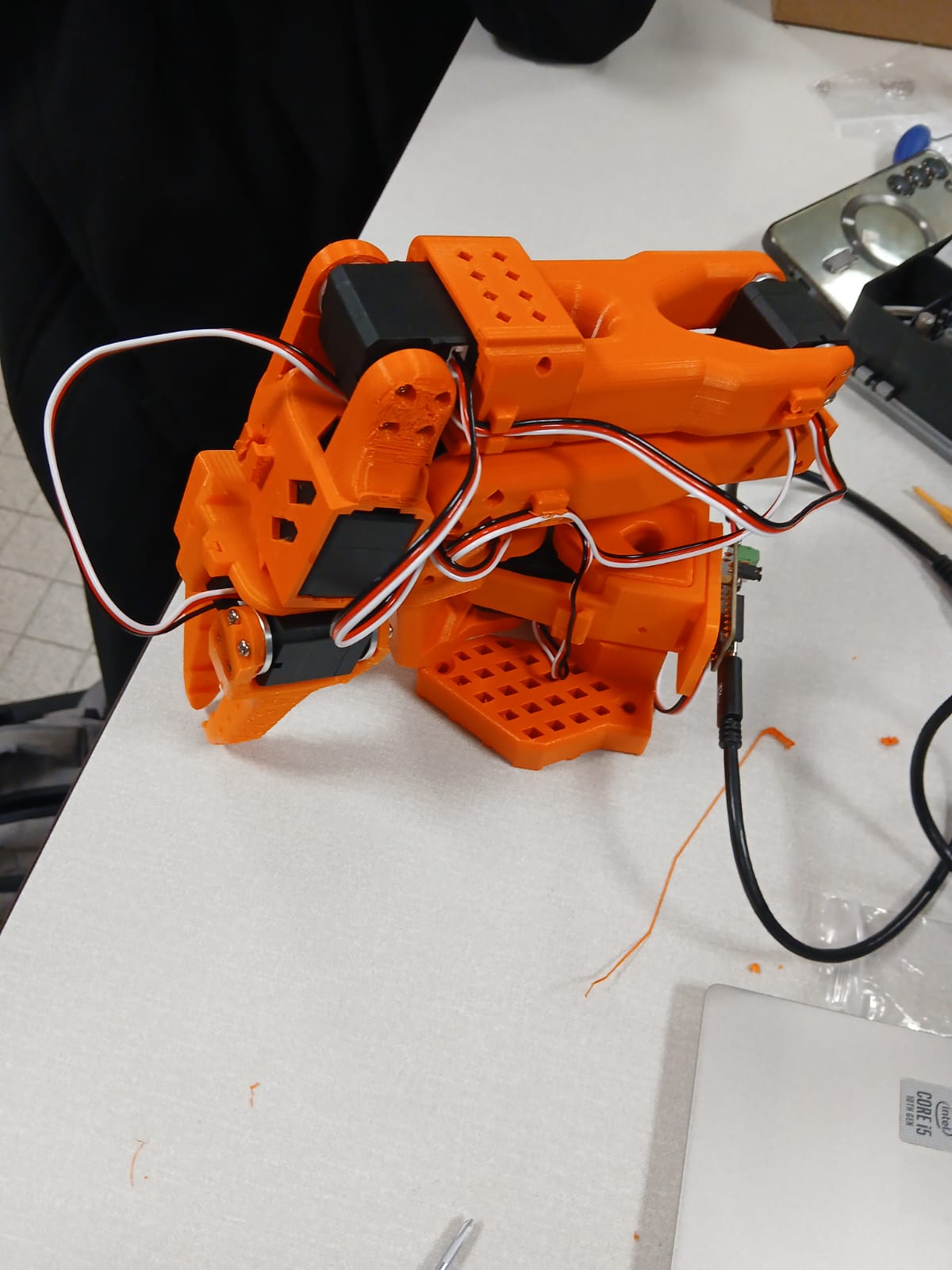
Unboxing, Assembly, and Low-level control, all in one weekend
The servos arrived around 1 month after ordering. We printed the 3D parts of the arm ourselves and assembled it over a weekend. Once the arm was assembled, I needed a driver to communicate with the servos. Rather than writing one from scratch, I found an open-source driver package by Bruk G. (brukg/SO-100-arm). It looked promising, and after a few tweaks and calibrations, we were able to control the arm using positional control via ROS2 Control. Pretty neat!
Configuring MoveIt 2 and Asynchronous Services
With the driver ready, I moved up the stack to planning and control. Here is where thing get complicated.
[To be continued…]